 Starting my second year of my doctoral research, I began developing control policies for multi-robot systems. In this work, my goal is to tackle the problem of spatial resource allocation using multi-robot teams.
Starting my second year of my doctoral research, I began developing control policies for multi-robot systems. In this work, my goal is to tackle the problem of spatial resource allocation using multi-robot teams.
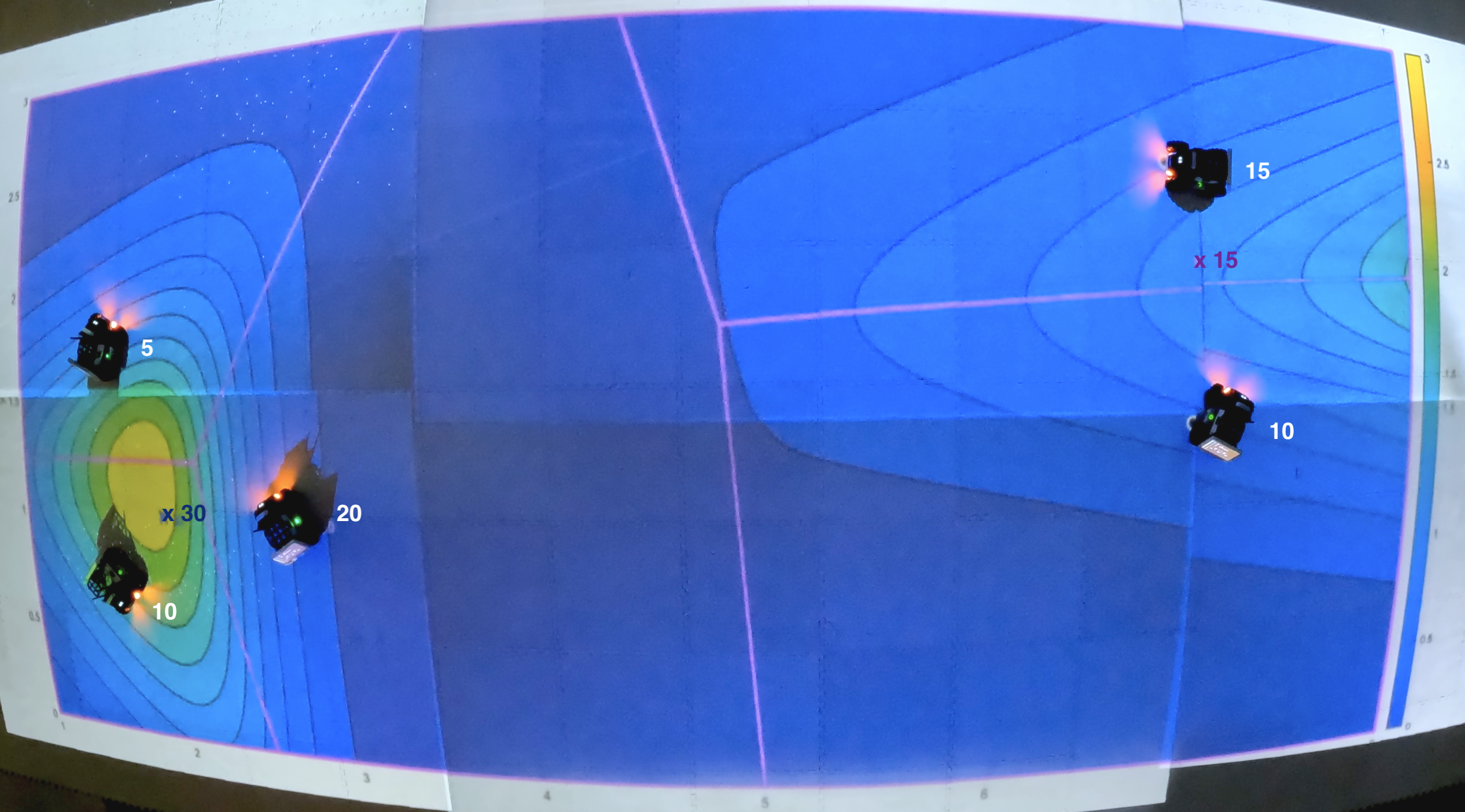
For example, suppose we have a map of active wildfires – we know where they are, and we know the severity of each one. The use of firefighting robots (drones) can assist humans in their firefighting efforts. Let’s say our robots are equipped with different types of resources: water, flame retardant, or both. Each robot has different capacities of these resources that they can carry. In this work, we develop a control policy to deploy these firefighting robots to the different wildfires based on the resources that each robot carries, and the amount of resources that each fire requires.
In our paper recently accepted to the 2023 IEEE International Conference on Robotics and Automation (ICRA), we consider a team of heterogeneous robots, each equipped with various types and quantities of resources, and tasked with supplying these resources to multiple areas of demand. We propose a Voronoi-based coverage control approach to deploy robots to areas of demand by defining a position- and time-varying density function to represent the quality at which demand is being met in the environment. Our proposed controller minimizes the locational cost, and allows robots to prioritize the various demand locations in a continuous, distributed fashion. You can find our paper here, and a corresponding video presentation below.
As an extension of this work, in a recent paper accepted to 2023 IEEE’s International Conference on Intelligent Robots and Systems (IROS), we explored resource dynamics, in that the demand for resources depletes as robots serve the demand. We also investigated ways to meet moving demand, and demand that is injected into the system. A pre-print of this paper is available here, and the corresponding video presentation can be found on my YouTube channel here.