In 2018, the summer after I started working in the Socha Lab, I served as a research intern in the Aspiring Scientists Summer Internship Program (ASSIP) at George Mason University (GMU). I worked in the Biomedical Imaging Lab (BMIL) under Professor Siddhartha Sikdar. I developed a haptic feedback device which could be mounted on a user’s arm and was designed to be implemented with prosthetic limbs such that the user could receive tactile information about their prosthesis. The device provided feedback in the form of skin-stretch, and I was able to show that my final device (far left picture below) successfully stretched the forearm skin to generate perceivable and measurable haptic feedback. I presented this work in the final ASSIP poster presentation (center picture below).
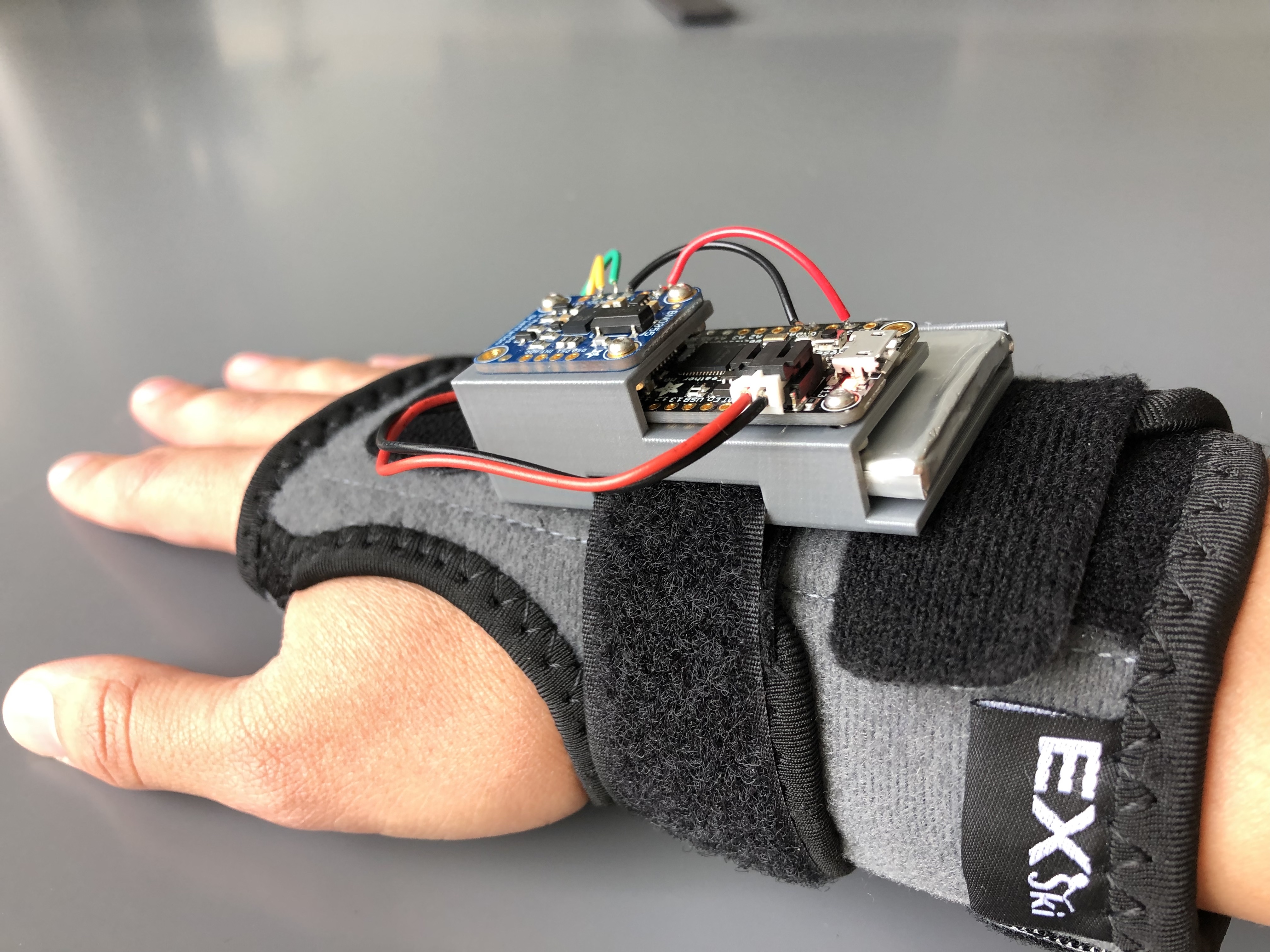
The following year, before I began research at Stanford, I returned to the BMIL to do about a month’s worth of research. Since task completion ability in experiments is primarily qualitative, we sought to quantify this ability. I therefore developed a way to wirelessly mount an inertial measurement unit (IMU) to a user’s wrist so that we could quantify - in terms of position, velocity, and acceleration - a user’s ability to complete tasks such as the Box and Block test. The mount is shown in the far right picture below.