Graduate Research
Multi-Robot Coverage and Resource Allocation
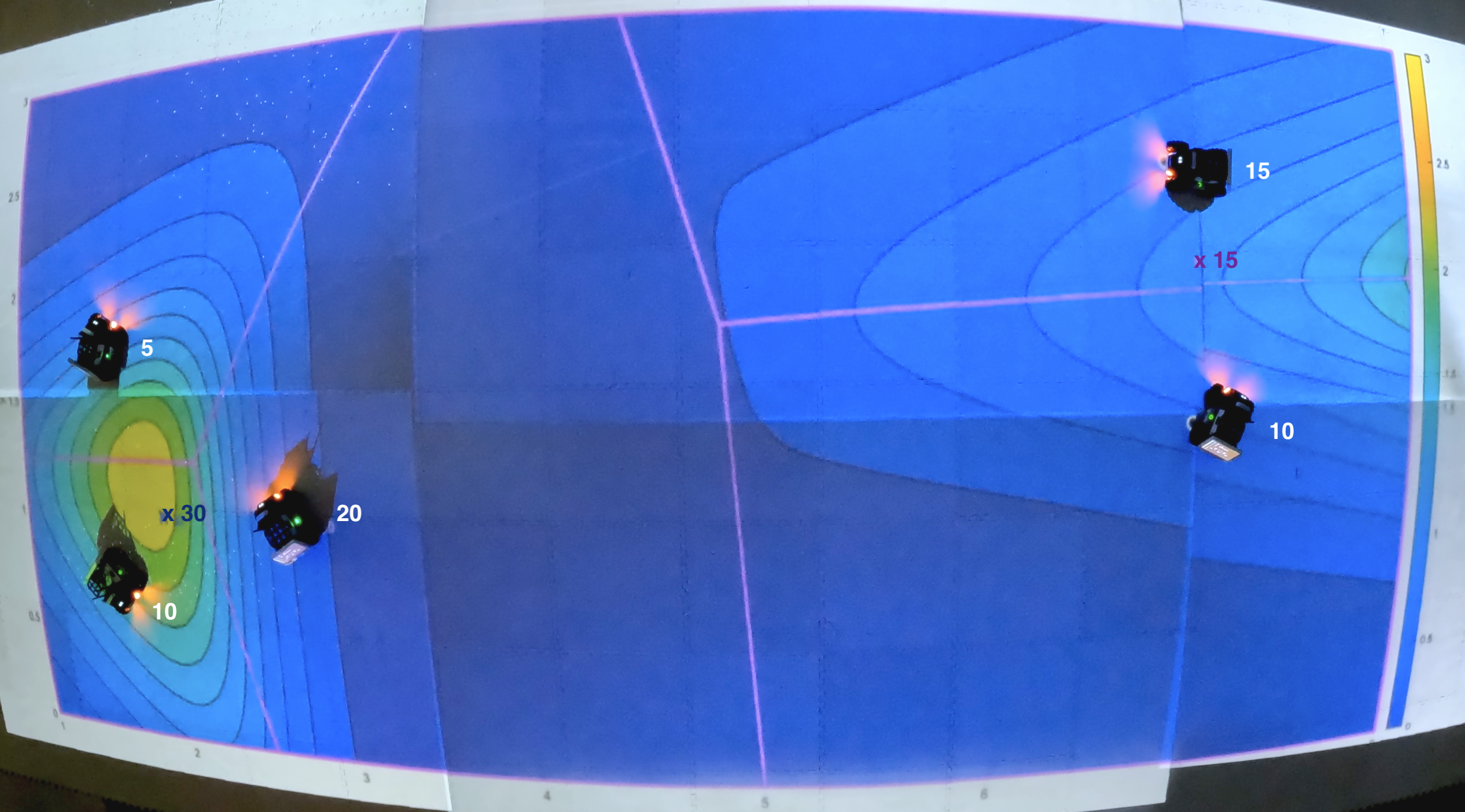
Following my work in collaborative teleoperation, I’ve been working on a coverage control approach to multi-resource allocation. We use a coverage control policy to deploy a team of mobile robots tasked with supplying resources of varying quantities and types to areas of demand.
Collaborative Teleoperation
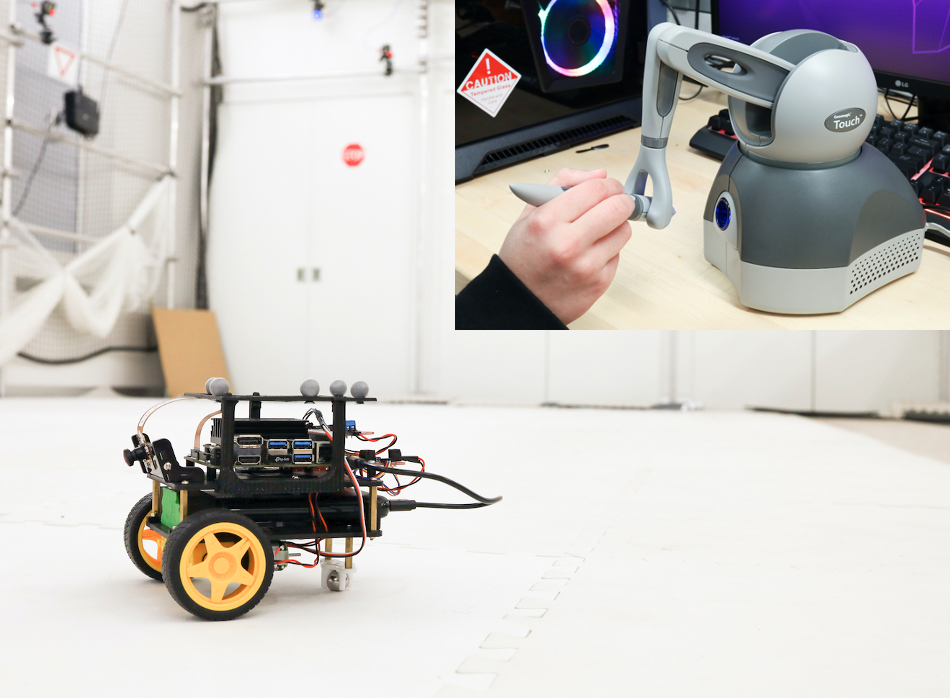
During my first year in the Collaborative Autonomy Group, I worked on enabling “co-navigation” of ground robots, in which a human teleoperates a ground robot, such as a powered wheelchair, through an environment, while the robot provides navigational assistance to the human via haptic feedback.
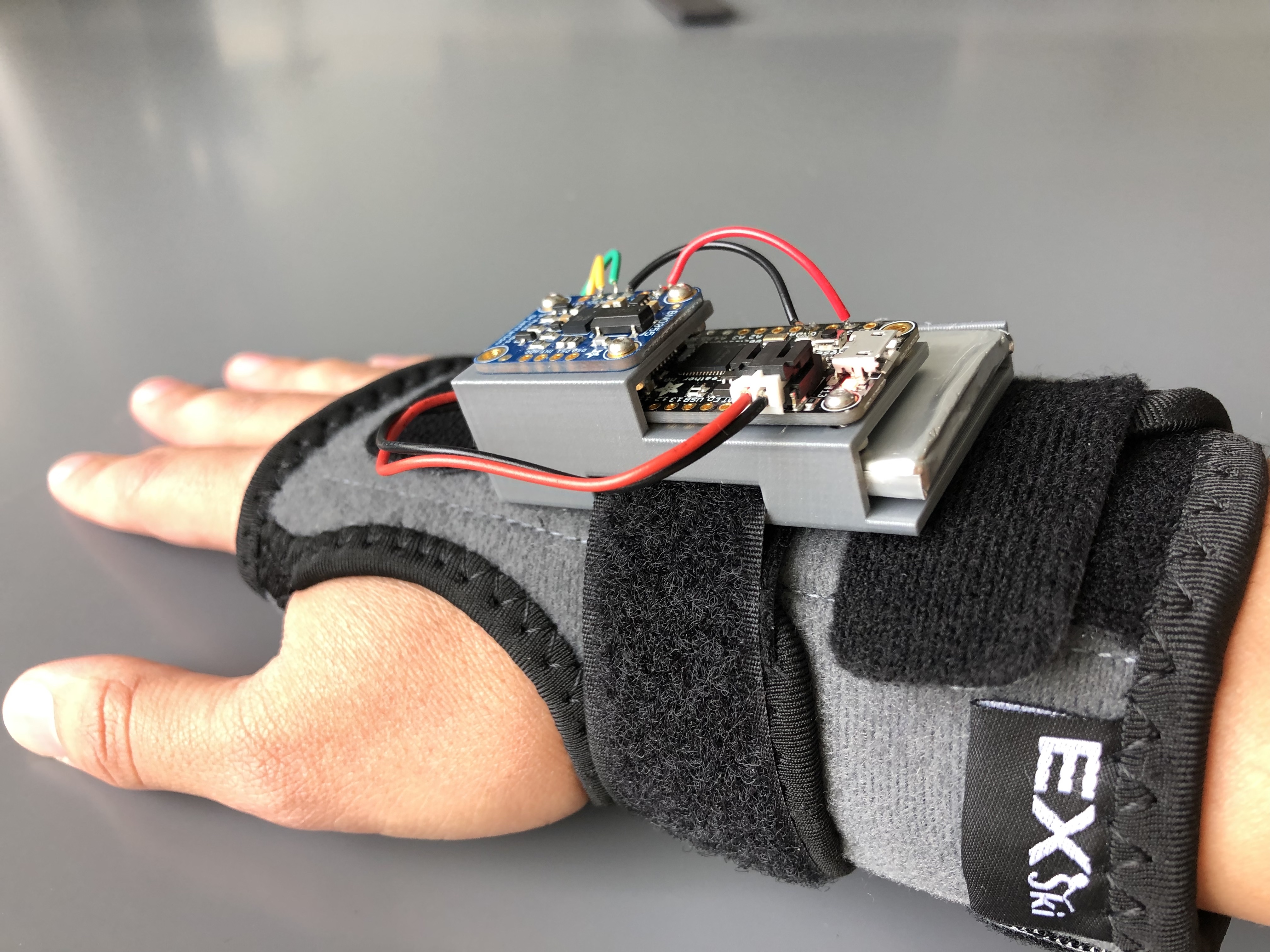
Haptic Modules
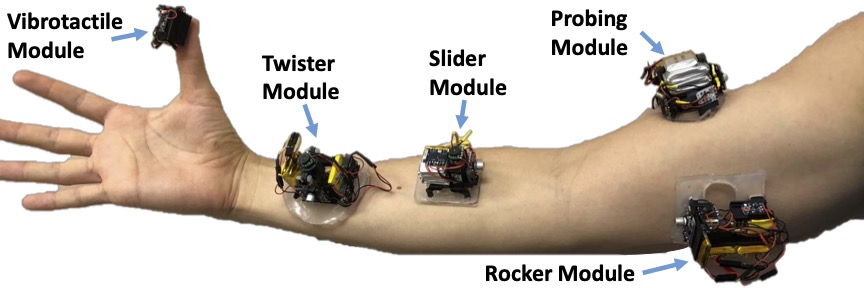
During my first lab rotation in graduate school I worked with students in the BU Robotics Lab to develop five haptic modules (shown on the left), with different types of haptic feedback. Our goal is for these modules to be a tool to rapidly develop prototypes of tactile displays.
Undergraduate Research
Medical Robotics
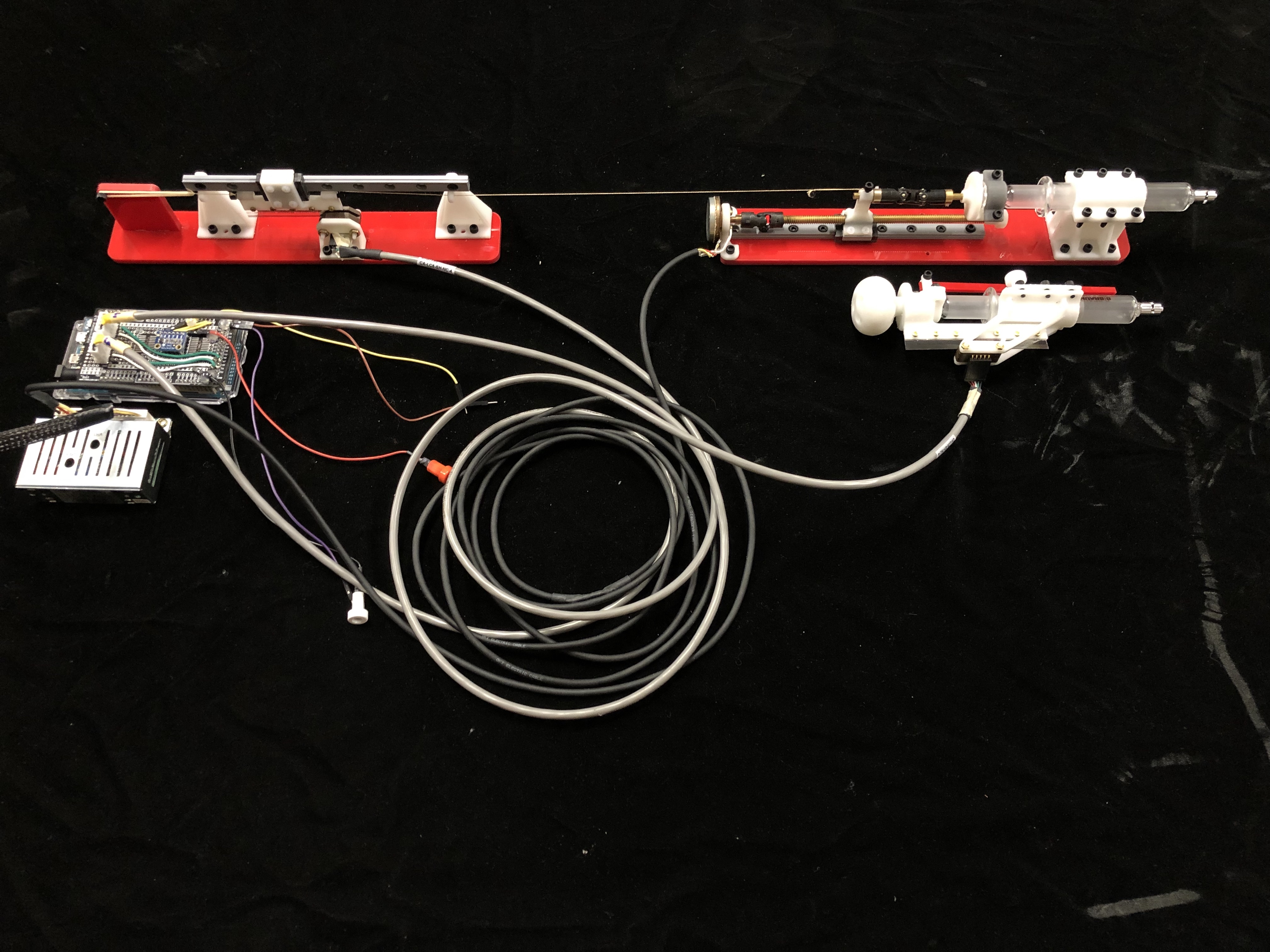
In 2019 I was a research fellow at Stanford University, where I primarily worked on developing an MRI-compatible surgical teleoperation device. I also developed a mold for phantom tissue for experiments.
Haptic Feedback
In 2018, I developed a haptic skin-stretch device for prosthetic limbs at George Mason University. In 2019, before I worked at Stanford, I also worked on quantifying task completion abilities for user studies.

Snake Biomechanics
I studied flying snake biomechanics from 2017 to 2020 at Virginia Tech. I analyzed data and also had the opportunity to travel to Australia’s Daintree Rainforest to study a close relative of the flying snake.
Publications
Journal Publications
- M. Coffey and A. Pierson, “Persistent Multi-Resource Coverage with Heterogeneous Multi-Robot Teams,” Advanced Intelligent Systems, pp. under review.
- S. Frishman, A. Kight, I. Pirozzi, M. Coffey, B. L. Daniel, and M. R. Cutkosky, “Enabling In-Bore MRI-Guided Biopsies With Force Feedback,” IEEE Transactions on Haptics, vol. 13, no. 1, pp. 159–166, 2020,
Peer-Reviewed Conference Publications
* indicates equal contributions
- M. Coffey and A. Pierson, “Assessing Reputation to Improve Team Performance in Heterogeneous Multi-Robot Coverage,” in 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, p. accepted.
- K. Vakil, M. Coffey, and A. Pierson, “Partial Belief Space Planning for Scaling Stochastic Dynamic Games,” in 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, p. accepted.
- M. Coffey and A. Pierson, “Covering Dynamic Demand with Multi-Resource Heterogeneous Teams,” in 2023 IEEE International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 11127–11134.
- *M. Coffey, *D. Zhang, R. Tron, and A. Pierson, “Reactive and Safe Co-Navigation with Haptic Guidance,” in 2023 IEEE International Conference on Intelligent Robots and Systems (IROS), 2023, pp. 213–220.
- M. Coffey and A. Pierson, “Heterogeneous Coverage and Multi-Resource Allocation in Supply-Constrained Teams,” in 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 3447–3453.
- M. Coffey and A. Pierson, “Collaborative Teleoperation with Haptic Feedback for Collision-Free Navigation of Ground Robots,” in 2022 IEEE International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 8141–8148.
- *R. E. S. Cruz, *M. Coffey, A. Y. Sawaya, and R. P. Khurshid, “Modular Haptic Feedback for Rapid Prototyping of Tactile Displays,” in 2021 IEEE World Haptics Conference (WHC), 2021, pp. 703–708.