During the summer of 2019, I was able to explore the field of medical robotics, specifically on the integration of haptics and surgical robots, as a Summer Undergraduate Research Fellowship (SURF) Scholar at Stanford University. I worked with a mechanical engineering doctoral student in Professor Mark Cutkosky’s Biomimetics and Dexterous Manipulation Laboratory (BDML). Our project was designed to show that the integration of haptic feedback into magnetic resonance (MR) compatible surgical robots would improve physician performance.
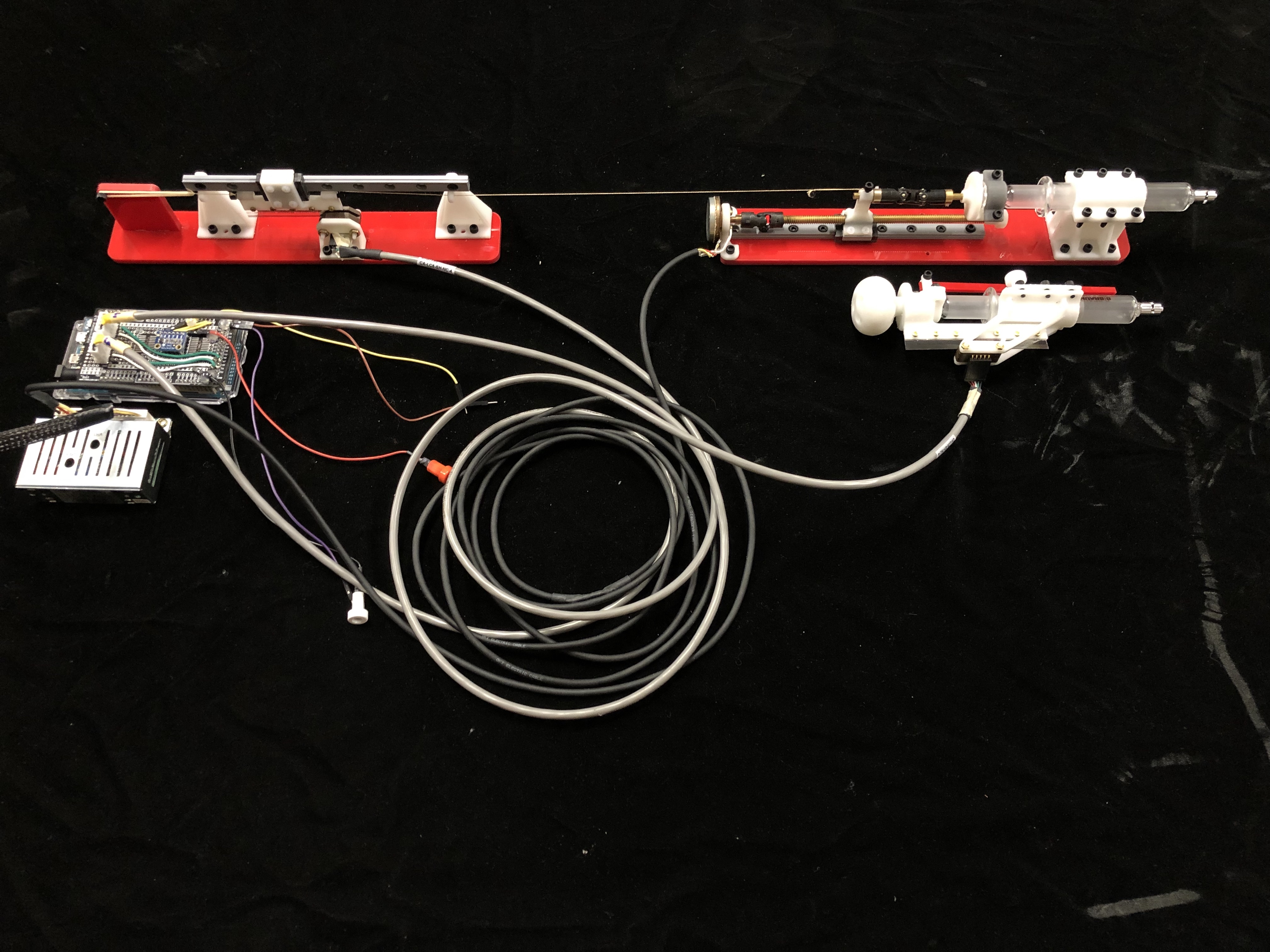
I designed and constructed the surgical device that acted as the experimental control; I developed an MR-compatible surgical teleoperation device which did not provide haptic feedback to the surgeon. My final device is shown in the far left picture below. I was able to show that the drive-by wire system I developed is adequate for MRI-guided procedures with minimal tracking error. I presented this work at the final SURF poster presentation (far right picture below).
I also designed the mold for the phantom tissue (agar) to be used in experiments. The goal of this design was to be able to see a surgical needle through the acrylic in relation to the membrane sandwiched between the two boxes of agar (see the center picture below). In 2020, my contributions to the project were included in a journal paper, on which I am a co-author [pdf] [url].
You can also find a detailed blog on the BDML website of my research progress over my 8 weeks at Stanford.